
La société Buck Engineering & Consulting (BEC) conçoit, fabrique et commercialise des simulateurs de mouvement basés sur des bras robotiques articulés. Le principe est de solidariser un cockpit, un habitacle au bout d’un bras robotique industriel. L’expérience sensorielle est augmentée de perturbations gravito inertielles réelles de la cabine. Ses clients sont principalement des entités de recherche.
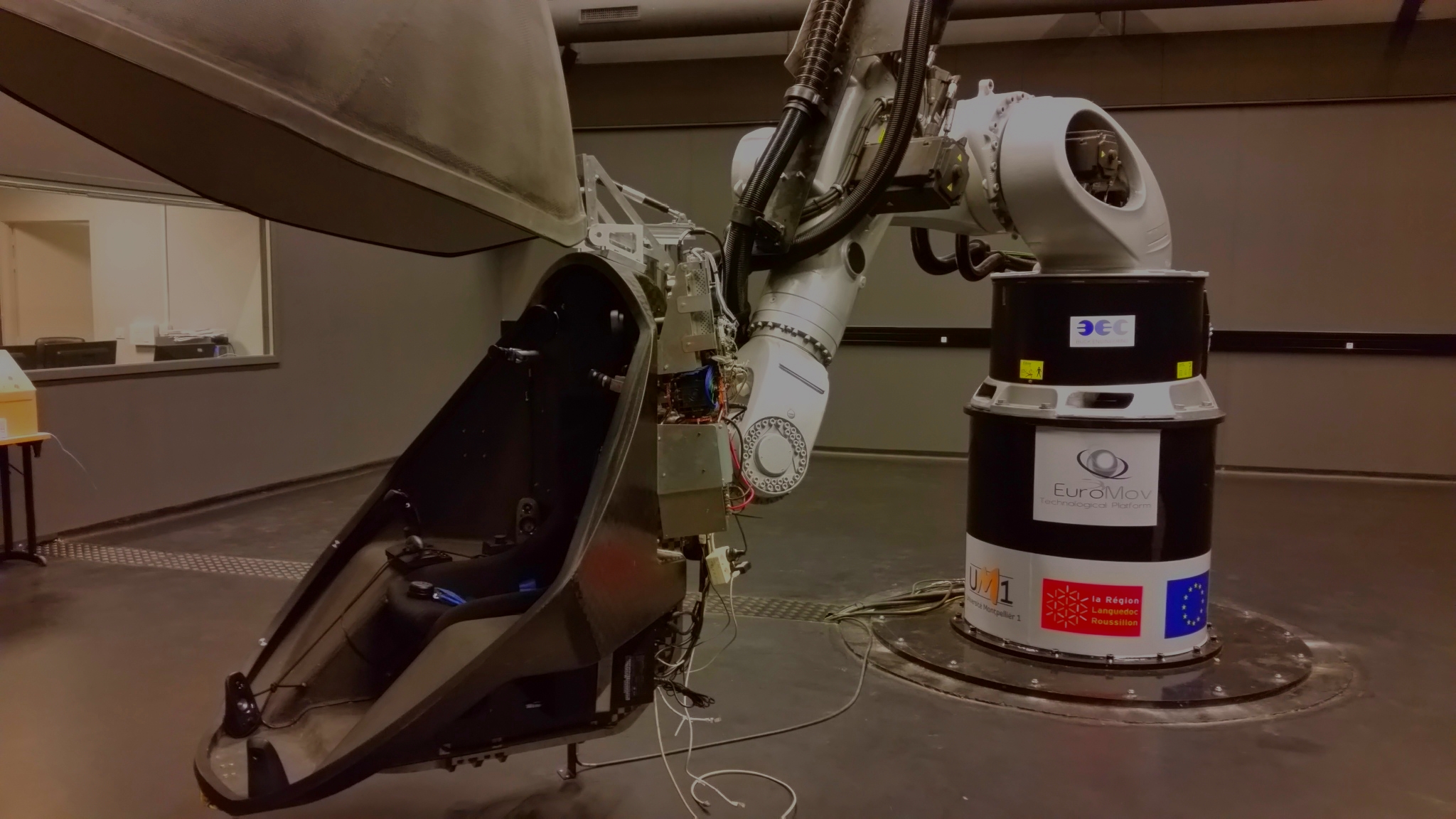
Le simulateur de mouvement iMose (interactive Motion Simulator at Euromov) est constitué d’un bras Kuka KR500 disposant de 6 axes de rotation. Une cabine est fixée à son extrémité, qui dispose d’une mobilité de six degrés de liberté. Cette cabine peut accueillir un utilisateur qui prend place dans l’habitacle et pilote un véhicule virtuel. L’utilisateur est immergé dans un environnement virtuel par projection d’images sur la face intérieure du dôme.
L’avantage de ce système consiste en la possibilité de réaliser un nombre presque illimité de mouvements au sein d’un volume de travail très compétitif. La cabine atteint des mouvements de translation linéaire allant jusqu’à trois mètres. Cependant, le contrôle temps réel de la position et de l’orientation de la cabine est complexe et non linéaire. D’autre part, les axes du robot sont limités en termes d’amplitude de déplacement, de vitesse et d’accélérations angulaires.
Nous souhaitons réaliser un modèle réduit du simulateur Imose pour deux raisons :
Outil de communication : le modèle réduit pourra être amené en forum ou salon de sorte à montrer les travaux réalisés sur le robot réel.
Outil de développement : L’idée consiste à disposer d’un double miniature pour tester des modèles de simulation avant de les implémenter sur le robot taille réelle.
En 2015, une étude de faisabilité a été initiée avec le montage d’une première maquette de bras articulé (rapport et réalisation disponible). Nous souhaitons poursuivre et conclure ces travaux
Les tâches à réaliser sont les suivantes :
- Finaliser le montage et l’habillage du modèle réduit (bras + cabine).
- Développement de l’algorithme de cinématique inverse : matrice de passage des coordonnées cartésiennes en coordonnées articulaires.
- Développement logiciel permettant la commande en déplacement du robot à partir des modèles Simulink disponibles :
- Récupérer les séquences articulaires Matlab/Simulink, développer la trame de commande : dans un premier temps en offline (Play-back de données enregistrées) puis en online (temps réel, interactivité).
- Prendre en compte les limitations cinématiques du simulateur Imose et les mapper sur le robot miniature.
- Etude sur le comportement dynamique du robot miniature, mise en évidence et analyse de la bande passante en fréquence pour chaque axe.
Objectif du projet :
- Livrer les composants matériels et logiciels permettant de piloter le modèle réduit à partir des modèles Matlab/Simulink
- Livrer une notice explicative (manuel utilisateur)
- Rapport de stage détaillé sur les actions réalisées
Jalons : Réunions bimensuelles de suivi
Localisation : Euromov, 700, avenue du pic saint loup, 34090 Montpellier
Ou
Laboratoire Polytech Bâtiment n°14 Campus triolet – Université de Montpellier
Place Eugène Bataillon, 34000 Montpellier
Démarrage du projet: 04 Avril 2016
Durée : 5 mois
En fonction de la tâche réalisée
Rémunération :
Montant légal (550 euros mensuel)
Contact :
Courriel : Jeremie.landrieu@univ-montp1.fr
Tel : +33 4 34 43 26 80